

 To get accustomed with the computer vision domain, I found myself a little challenge: from the picture of a screw the contour has to be extracted. This maybe could be useful later in the process of categorizing. On the left you can see the original foto, on the right the extracted contour.
To get accustomed with the computer vision domain, I found myself a little challenge: from the picture of a screw the contour has to be extracted. This maybe could be useful later in the process of categorizing. On the left you can see the original foto, on the right the extracted contour.
What should I choose?
How does the technology stack currently look like? What I already almost chose.
- computer vision with Raspberry Pi
- library OpenCV 3.1 with Python binding
- Eclipse Mars with PyDev plugin on Ubuntu
- servomotor for opening and closing of the stopper
- stepper motor for pivotable chute
- webcam for computer vision
- LED stripe for indirect illumination (shadow free images of screws)
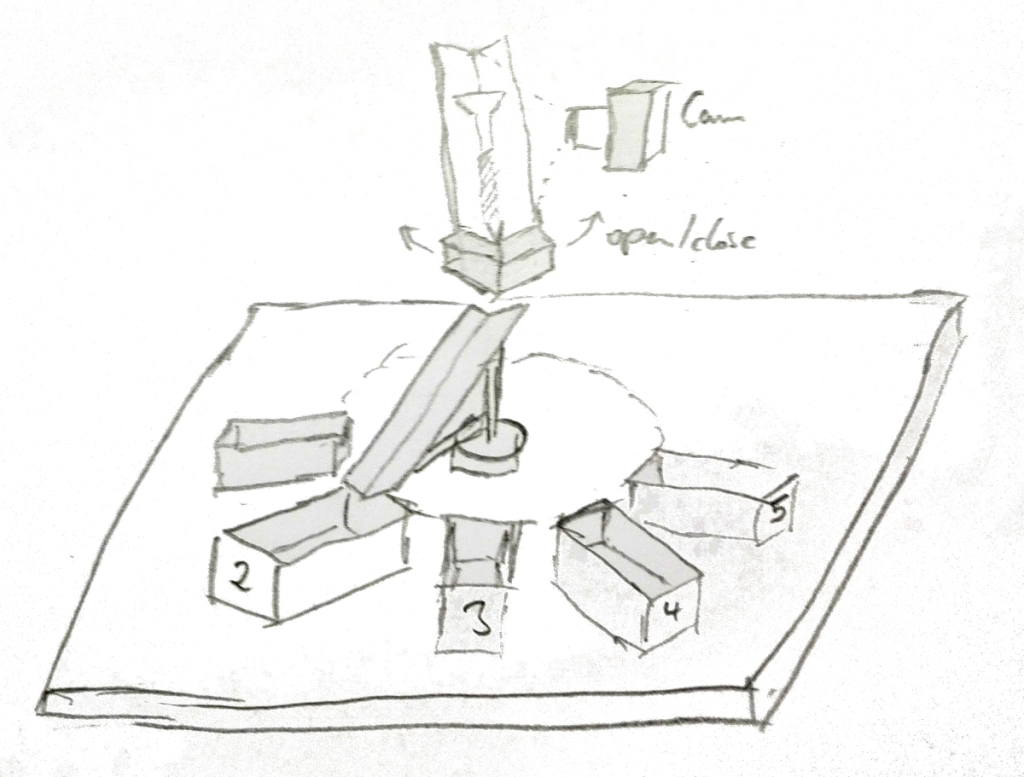
The Idea
Here I have a rough sketch of the idea, how to build a sorting machine: First the screw is gliding down a rail down to a stopper. Then a computer vision process is categorizing it and after the stopper opens, a pivotable chute lets the screw run down to the appropriate box.
The Beginning
Over the years a more or less large amount of screws of different sizes and types gathered in boxes and jars on my workbench. This then usually is the final state of these screws, as I can’t really dispose brand new screws. How to escape from this dilemma? – Just sort them. But doing this by hand is far too laborious, of course. So it’s clear, that I need a screw sorting machine, doing this for me.
In this blog I will document my project to design an build such a machine. This may take several months or even years, but in the end the screws will lie all sorted in their boxes.